Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
Autonome mobile Roboter führen Transportaufgaben in der Logistik selbstständig durch. Hierbei navigieren sie in einem dynamischen Umfeld mit beispielsweise Routenzügen, Gabelstaplern oder Personen. Die autonome Navigation nutzt 2D-Laserscanner, um die Umgebung zu erfassen. Jedoch sind deren Umgebungsinformationen begrenzt, sodass Semantiken nicht zuverlässig erkannt werden können. Eine KI-basierte Lösung kann dies verbessern. Für einen reibungslosen Betrieb muss der Roboter sein Verhalten situativ an das Umfeld anpassen, sodass er bspw. Routenzügen Vorrang gewähren kann. Für Routenzüge, Gabelstapler etc. gibt es aber noch keine Objekt- /Bilddatenbanken. Dies hat zur Folge, dass verfügbare KI-Modelle diese Objekte nicht wahrnehmen können.
Lösungsidee
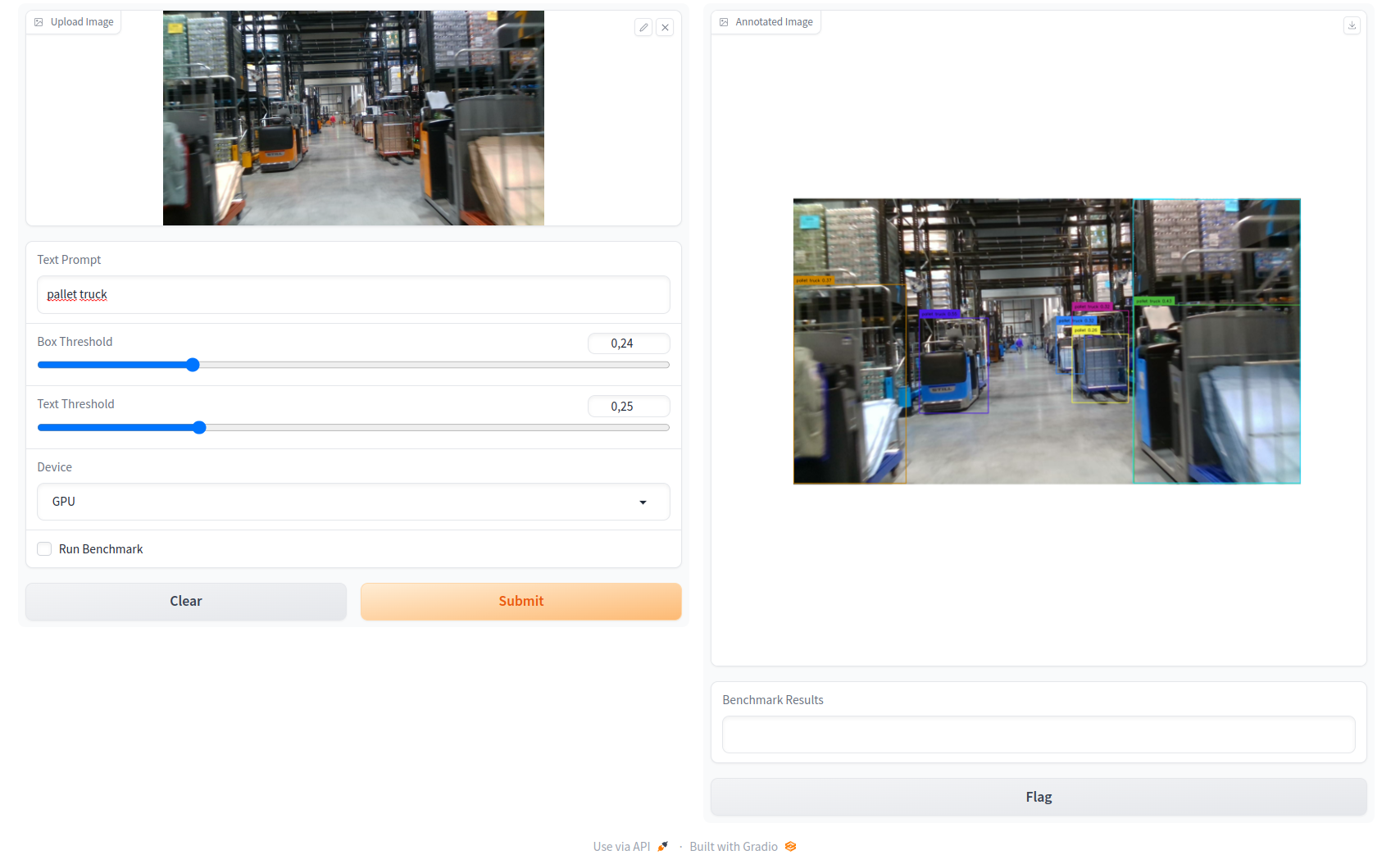
Ein komplexes Verständnis der Umgebung kann mithilfe von visuellen Perzeptionsalgorithmen generiert und in einem vom Fraunhofer IPA entwickelten Umgebungsmodell verwaltet und analysiert werden. Möglich wird dies, wenn es gelingt, modernste KI-Methoden zu adaptieren, um die relevanten Objektklassen zu erkennen.