Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«
Fraunhofer-Gesellschaft | KI-Fortschrittszentrum »Lernende Systeme und Kognitive Robotik«Quick Check
Ausgangssituation
Bei der Automatisierung mit Robotern ist das exakte Positionieren des Roboters über das sogenannte »Teach-Panel« unter anderem wegen der Positionierung zeitraubend.. Die Firma drag&bot beschäftigt sich seit geraumer Zeit mit der Vereinfachung des Programmierprozesses. Erklärtes Ziel ist es, die Bedienung des Roboters so einfach wie ein Smartphone zu gestalten. Deshalb suchen Expertinnen und Experten nach alternativen Möglichkeiten zur Programmierung von Positionen, die diese Hürde intuitiv umgehen können und damit Automatisierung für einen größeren Nutzerkreis verfügbar machen.Die am Fraunhofer IPA entwickelte Technologie »Programming-by-Demonstration« (PbD) ermöglicht Nutzenden, den betrachteten Prozess zu Demonstrieren und damit das explizite Einprogrammieren von Positionen zu umgehen. Durch Methodiken des Maschinellen Lernens können dabei intelligente Programme gelernt werden, die sich selbstständig an neue Situationen anpassen und robust gegenüber Störungen sind.
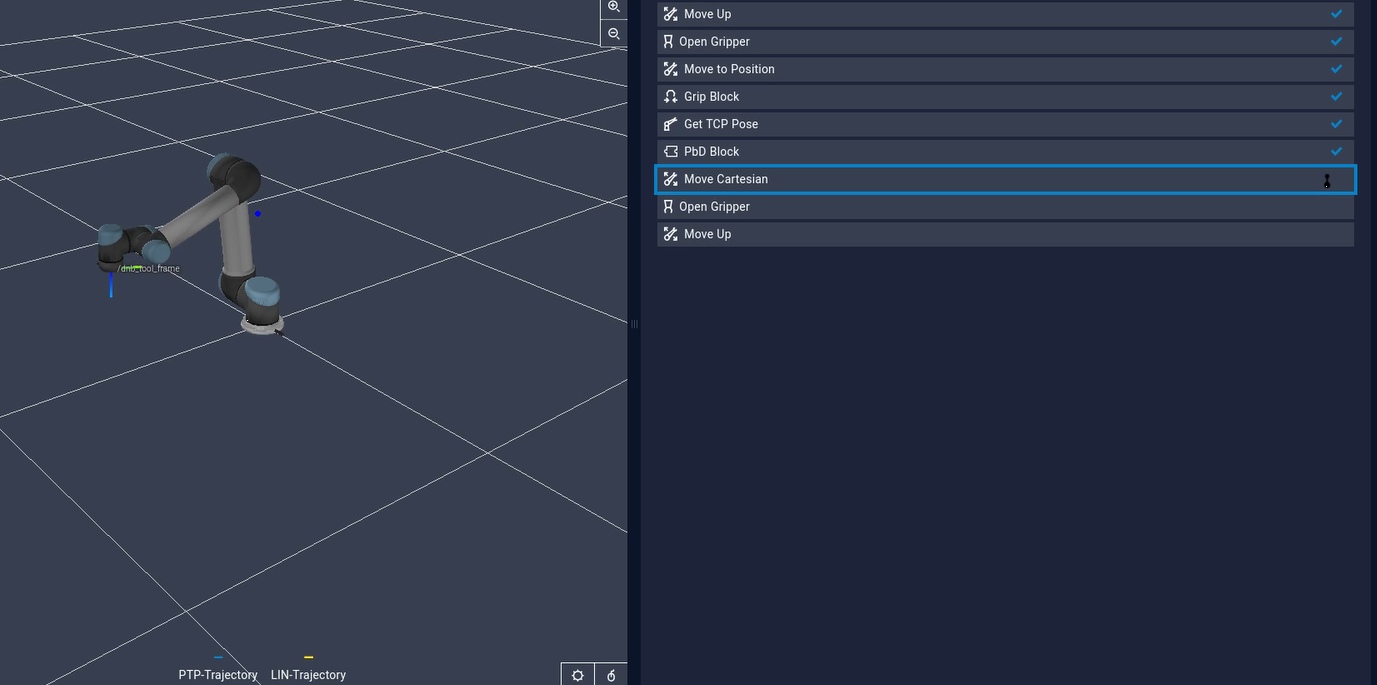
Lösungsidee
Da das PbD-System momentan beforscht wird, ist dessen Handhabung noch sehr unintuitiv und erfordert technisches Spezialwissen. Die Kombination von intuitiver Roboterprogrammierung zusammen mit PbD verspricht dabei, dass auch kleine und mittelständische Unternehmen und nicht-technisches Personal schnell und effizient intelligente Roboterprogramme erzeugen können.